In diesem Beitrag beschreiben wir die neuesten Ereignisse und Patentanmeldungen rund um autonome Fahrzeuge.
Amazon will sich am Startup für selbstfahrende Lkws beteiligen, plus
Amazon hofft, dass fahrerlose autonome Lastwagen eines Tages sein riesiges Liefernetzwerk antreiben werden. Das Unternehmen hat 1.000 autonome Fahrsysteme bei Plus bestellt, einem Startup, das 2016 gegründet wurde, um die Langstrecken-LKW-Branche mit selbstfahrender Technologie zu revolutionieren. Dieser Deal gibt Amazon das Recht, bis zu 20 Prozent des Unternehmens selbst zu erwerben. Lesen Sie mehr über die Ankündigung hier.
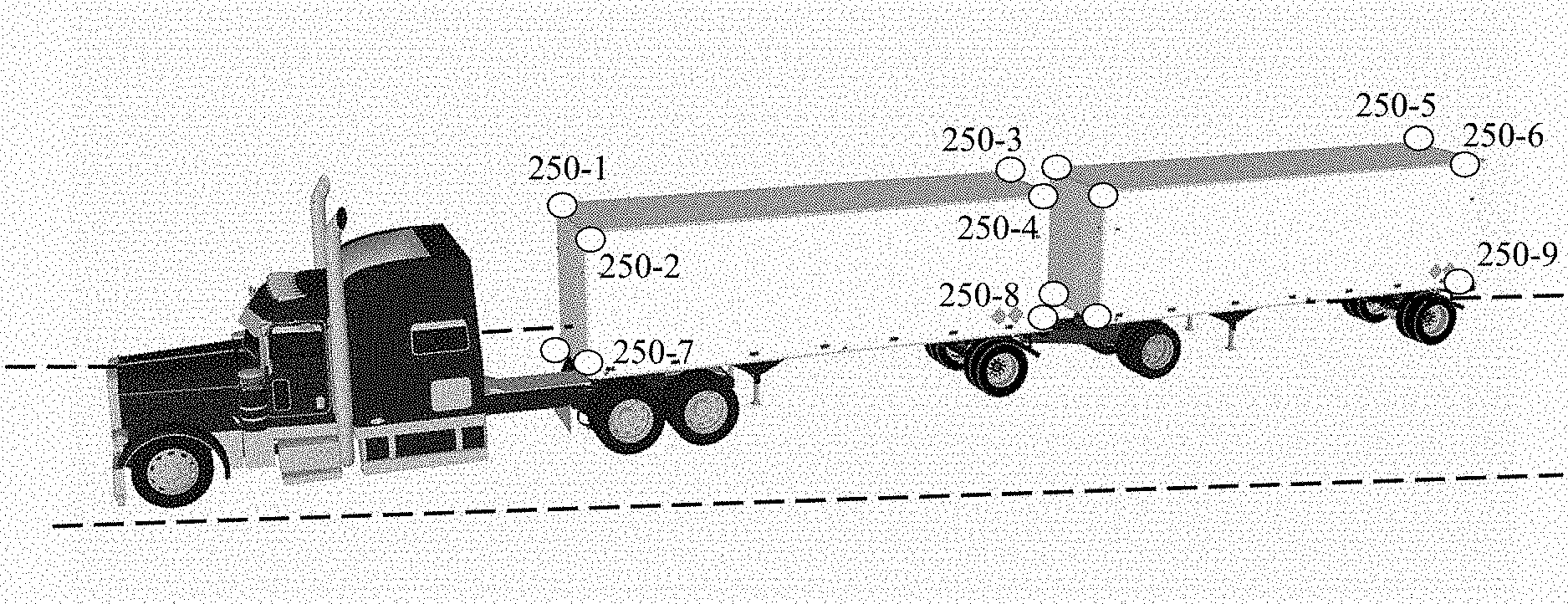
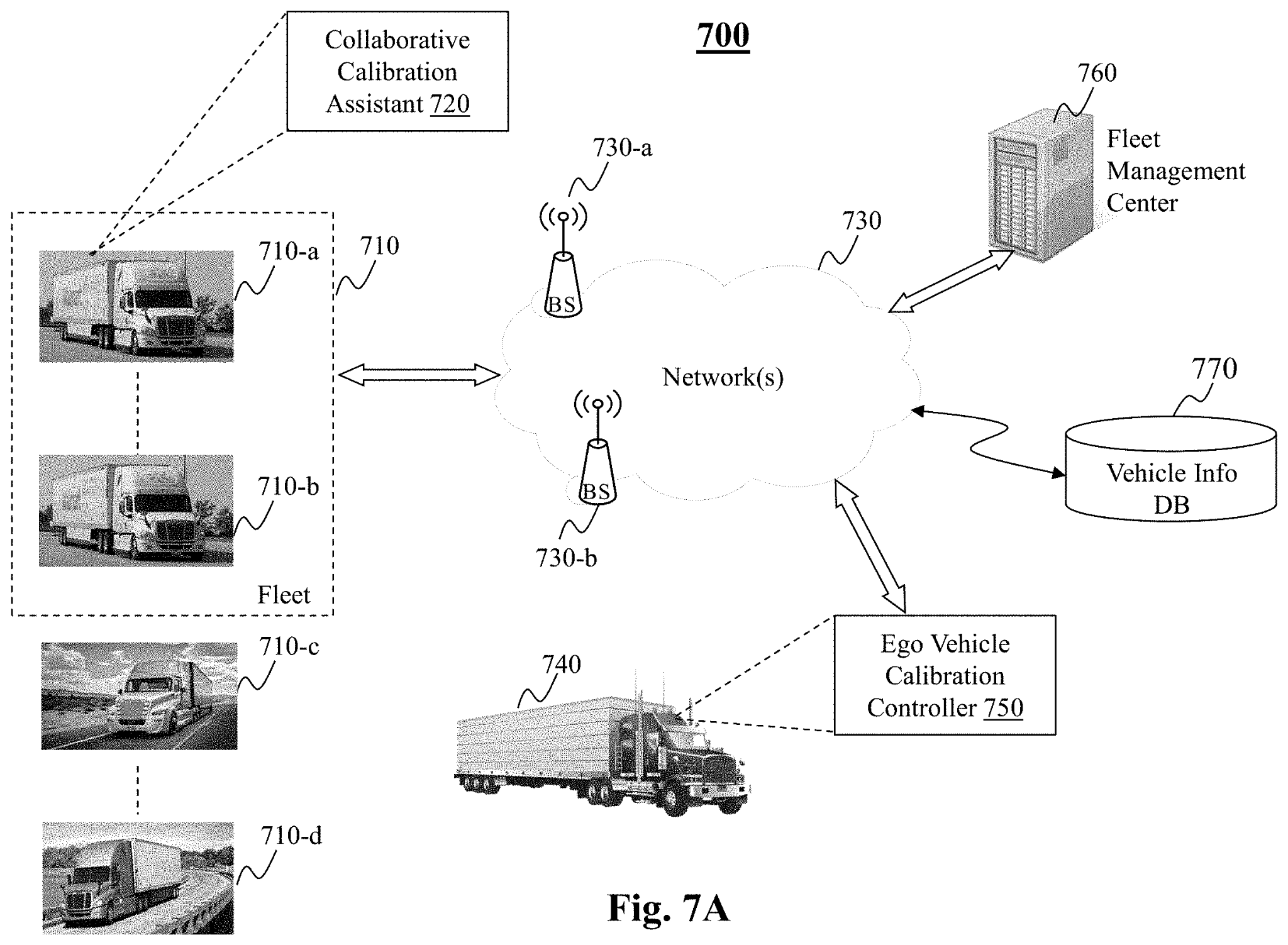
Die US-Patentanmeldungen US20210172761A1 mit dem Titel "System and Method for Collaborative Calibration via Landmark" und US20210174685A1 mit dem Titel "System and Method for Coordinating Collaborative Sensor Calibration", die PlusAI zugewiesen wurden, beschreiben ein Verfahren zur kollaborativen Sensorkalibrierung zur Erleichterung der Bedürfnisse des autonomen Fahrens eines Ego-Fahrzeugs (740), das über eine Fernzentrale (760) mit Assistenzfahrzeugen (710) verbunden ist. Wenn das Ego-Fahrzeug ein Kalibrierungsassistenten-Paket empfängt, das Informationen enthält, die mit einem entlang der Route vorhandenen kollaborativen Mittel verbunden sind, das verwendet werden soll, um das Ego-Fahrzeug bei der Kalibrierung seines Sensors zu unterstützen, identifiziert es auf der Grundlage der Informationen das kollaborative Mittel entlang der Route, wenn sich das Ego-Fahrzeug in der Nähe des kollaborativen Mittels befindet, um ein auf dem kollaborativen Mittel vorhandenes Ziel zu erfassen, um die Kalibrierung des Sensors zu ermöglichen.
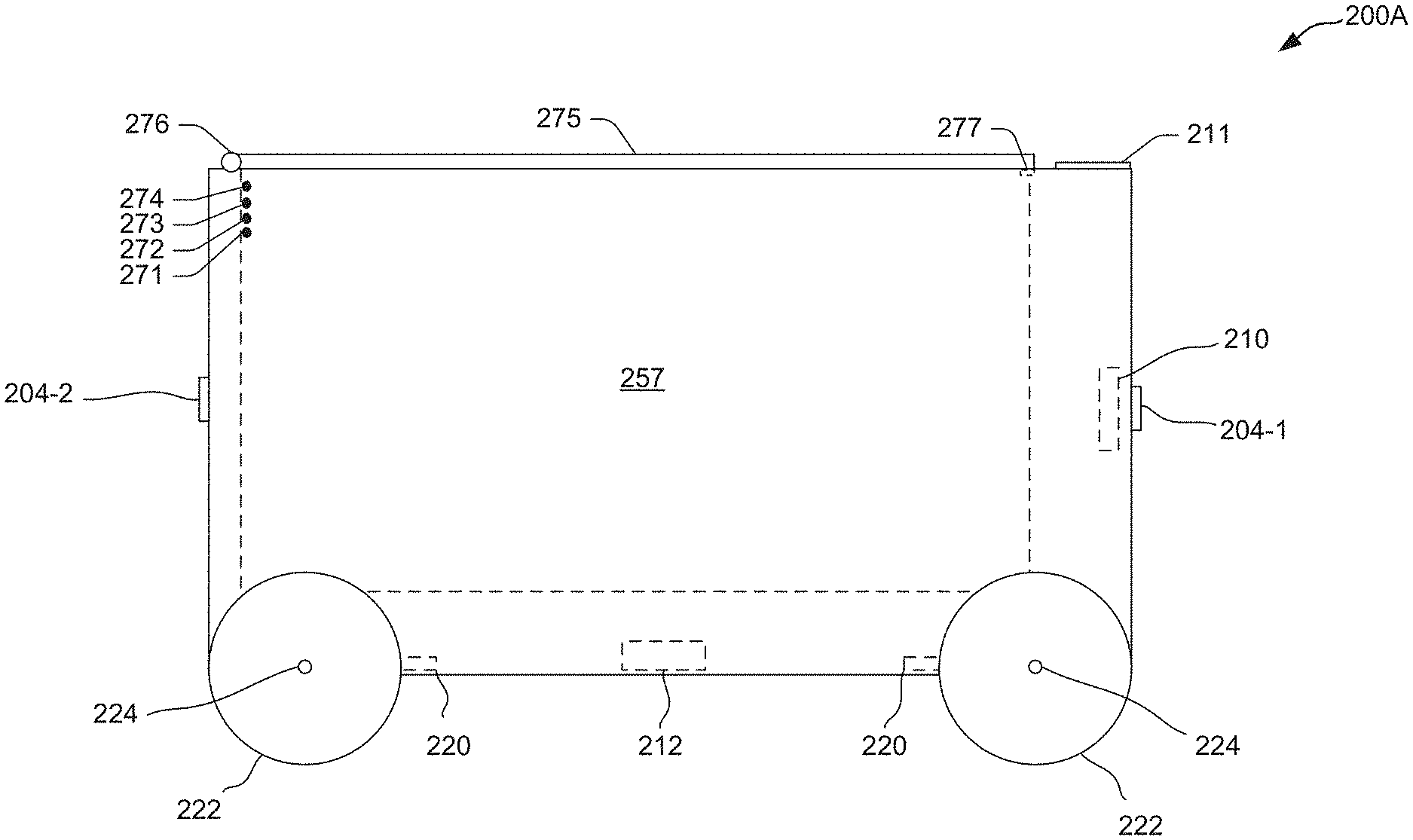
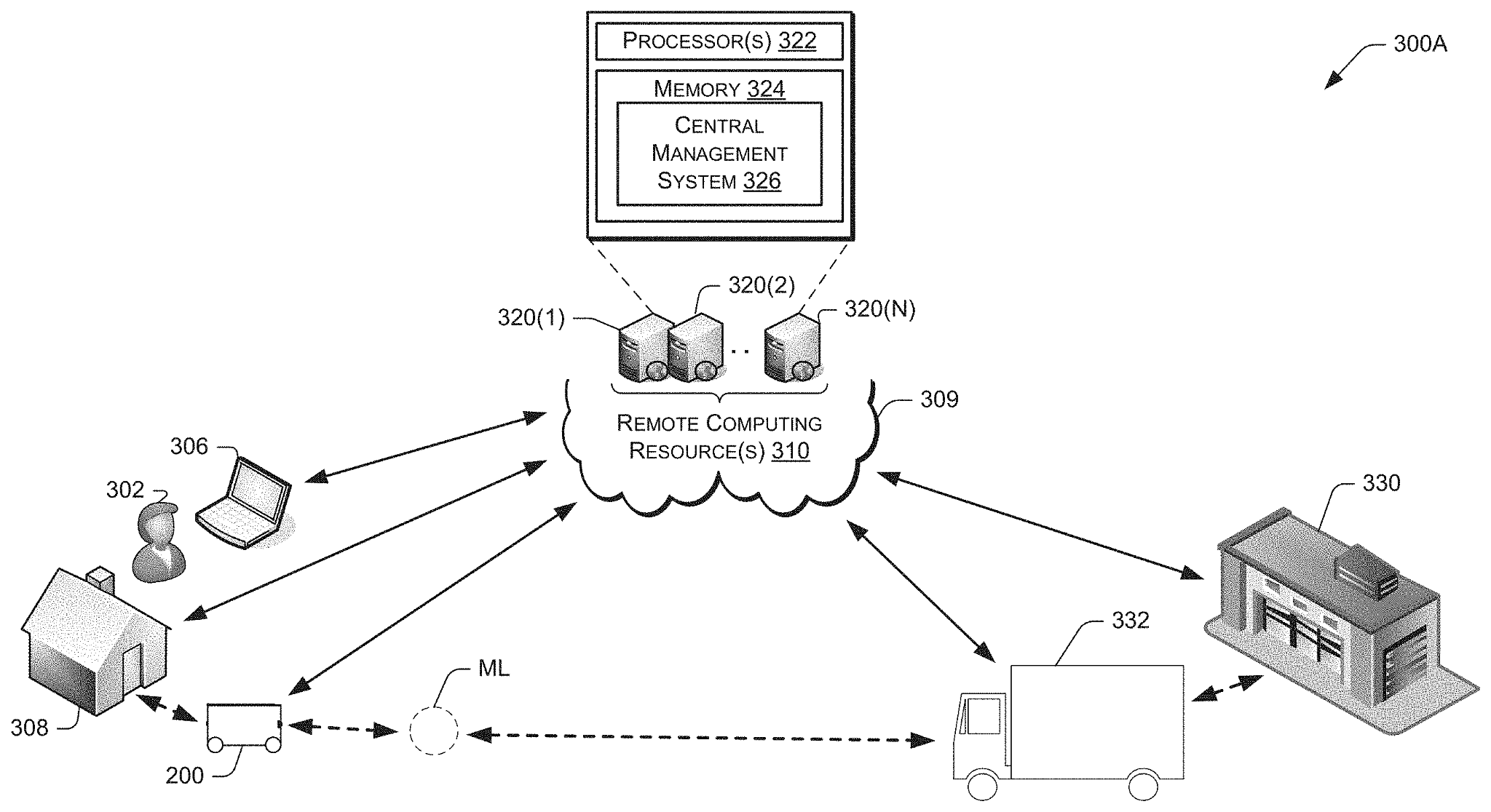
Die US-Patentanmeldung US20210141377A1 mit dem Titel "Autonomous Ground Vehicles Having Access Mechanisms and Receiving Items from Transportation Vehicles for Delivery" (Autonome Bodenfahrzeuge mit Zugangsmechanismen und Empfang von Gegenständen von Transportfahrzeugen für die Auslieferung), die Amazon Technologies zugewiesen wurde, beschreibt autonome Bodenfahrzeuge ("AGVs") (200), die Gegenstände von Transportfahrzeugen (z. B. Lieferwagen) (332) für die Auslieferung an bestimmte Orte (z. B. Benutzerwohnungen usw.) empfangen. Die FTS können entlang von Fahrwegen zu und von den Lieferorten fahren, um die Gegenstände auszuliefern, und können mit Zugangsmechanismen (z. B. zur Übertragung von Fernsteuerungssignalen) ausgestattet sein, um Zugangsbarrieren (z. B. Garagentore usw.) zu öffnen und zu schließen, die entlang der Fahrwege vorhanden sind.
Velodyne konzentriert sich auf kleine und preisgünstige Festkörper-Lidarsensoren
Velodyne Lidar, der führende Hersteller von Lidar-Sensoren, hat ein Produkt entwickelt, das nur noch ein Hundertstel so viel kostet wie andere Lidar-Sensoren. Dieser drastische Preisrückgang für diese Sensoren, die das Herzstück vieler autonomer Fahrzeugkonzepte bilden, könnte die Entwicklung selbstfahrender Fahrzeuge beschleunigen. Da die Kosten für Lidar-Sensoren sinken, können sie kostengünstig mit Kameras kombiniert werden, um wirklich sichere und erschwingliche Sichtsysteme zu schaffen. Lesen Sie hier mehr.
Die US-Patentanmeldung US20210003681A1 mit dem Titel "Interference Mitigation for Light Detection and Ranging", die Velodyne Lidar zugewiesen wurde, beschreibt Dithering-Techniken, die die Auswirkungen von Signalinterferenzen in LIDAR-Sensoren und -Systemen in autonomen Fahrzeugen wirksam reduzieren Das Filter-Subsystem ist so konfiguriert, dass es die elektrischen Signale vom Empfänger empfängt und feststellt, ob eine Kohärenz zwischen einem Punkt und entsprechenden Nachbarpunkten entlang mindestens einer ersten Richtung und einer zweiten Richtung des Punktesatzes besteht.
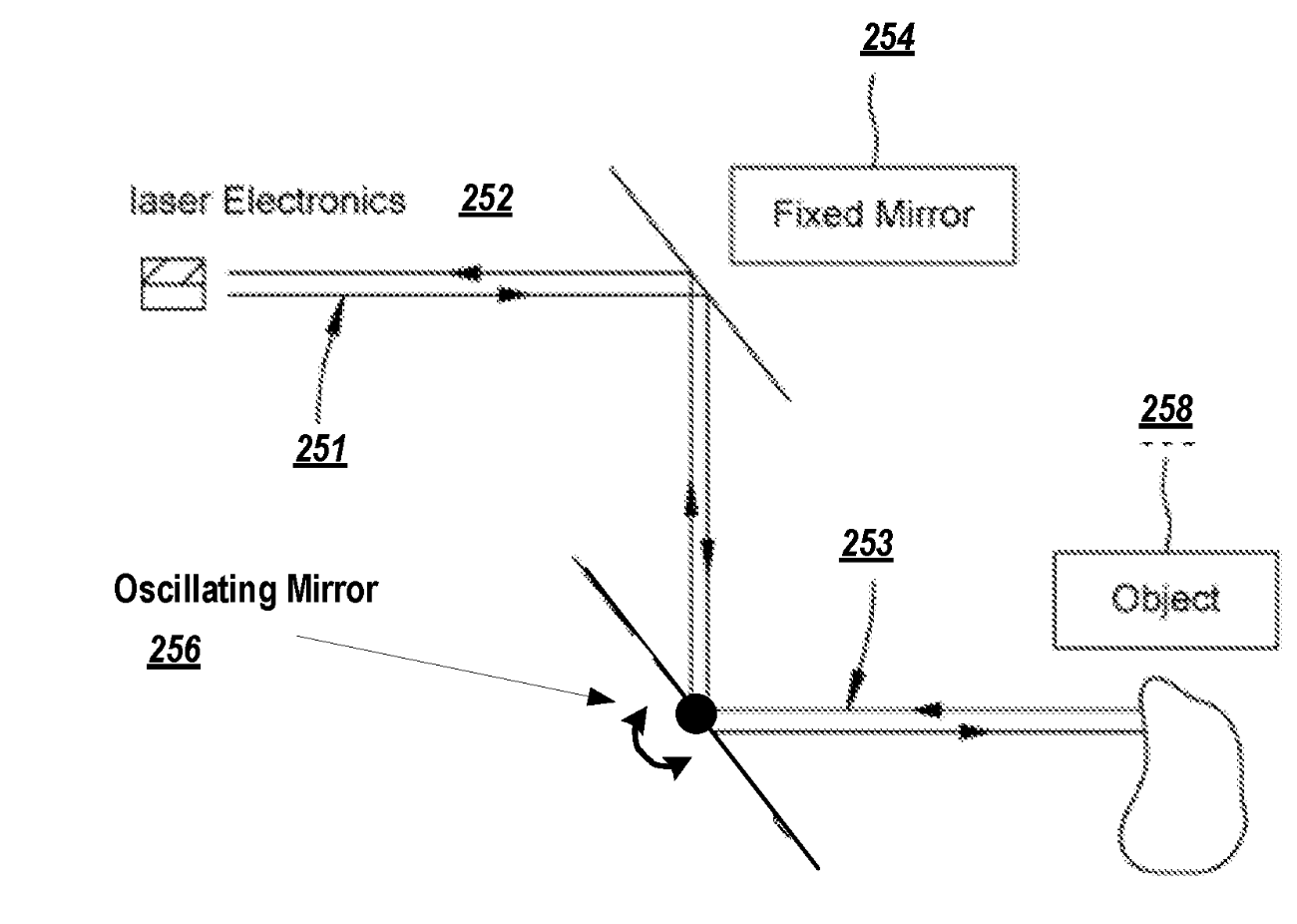
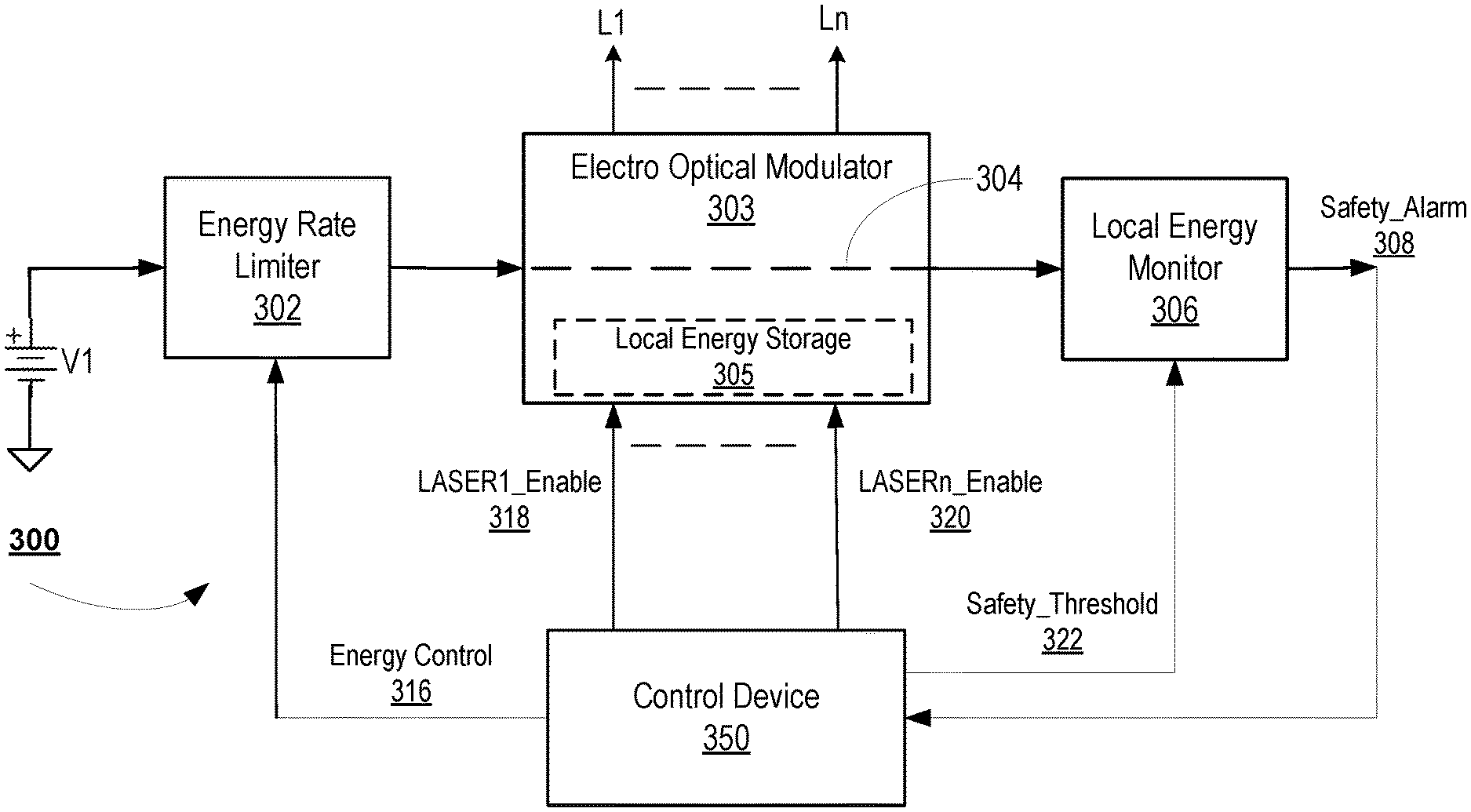
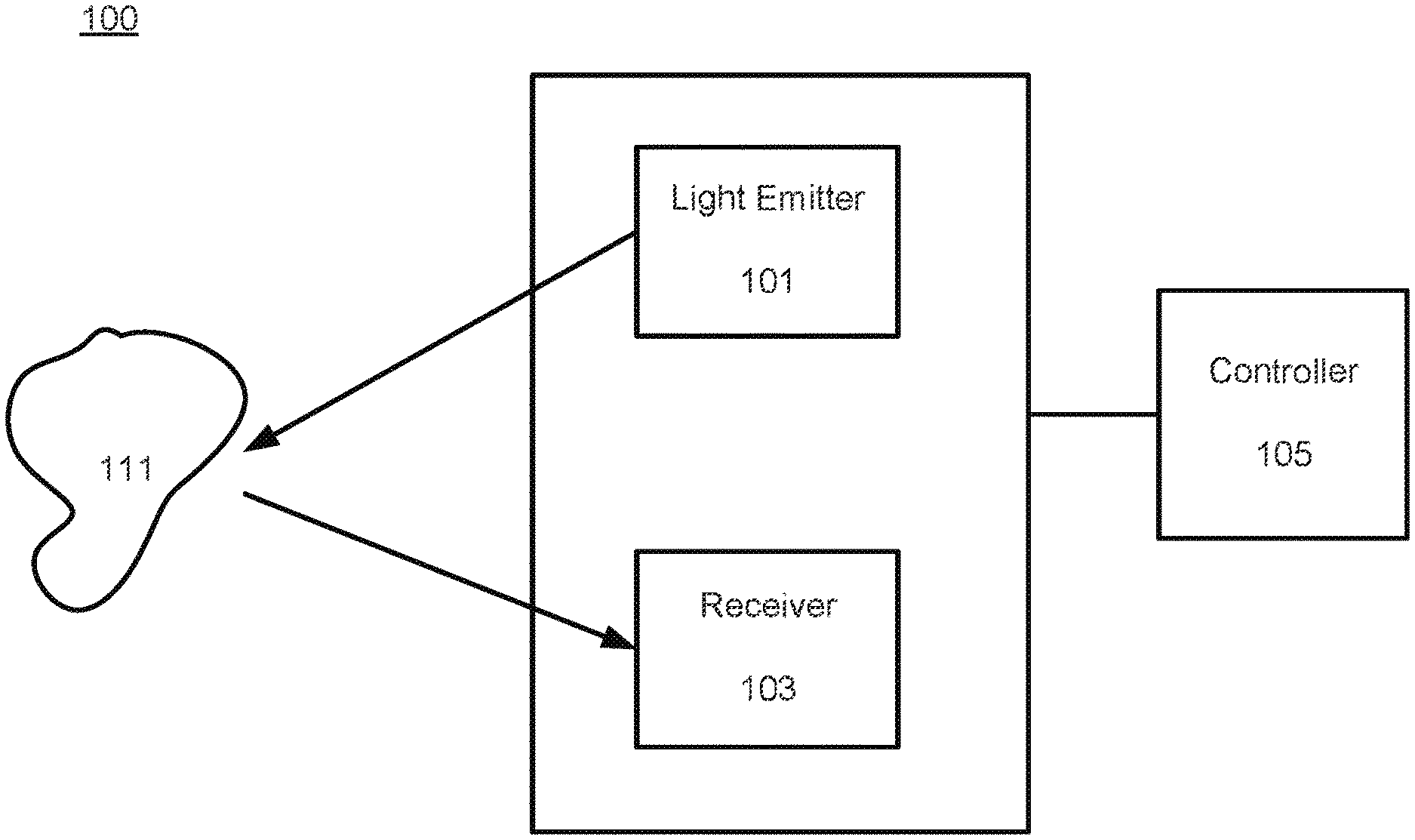
Die US-Patentanmeldung US20210041567A1 mit dem Titel "Apparatus and Methods for Safe Pulsed Laser Operation" (Gerät und Verfahren für den sicheren Betrieb von gepulsten Lasern), die Velodyne Lidar zugewiesen wurde, beschreibt eine Vorrichtung und ein Verfahren zum Schutz der Gesundheit eines Benutzers während des Betriebs von gepulsten Lasern und Verfahren, die die Sicherheit der Augen während erwarteter und unerwarteter Betriebsbedingungen eines optischen Systems, wie z. B. eines LiDAR-Systems (Light Detection and Ranging), verbessern können. Das System besteht aus einem Energieratenbegrenzer, der die Energieübertragung von der Stromversorgung zum lokalen Energiespeichermodul unterbricht, wenn die Sicherheitsbedingung verletzt wird.
NVIDIA erwirbt DeepMap Inc. und stärkt damit seinen autonomen Flügel
NVIDIA ist bereit, DeepMap zu kaufen, um seine Technologie für autonome Fahrzeuge zu erweitern. Das Unternehmen plant, die Technologie in seine Drive-Plattform zu integrieren, um die Mapping- und Lokalisierungsfunktionen zu verbessern. Die Drive-Technologie wird derzeit von Mercedes-Benz, Hyundai, Audi, Volvo und anderen Unternehmen mit unterschiedlichem Funktions- und Komplexitätsgrad eingesetzt. NVIDIA geht davon aus, dass die Übernahme im dritten Quartal 2021 abgeschlossen sein wird. Lesen Sie hier mehr .
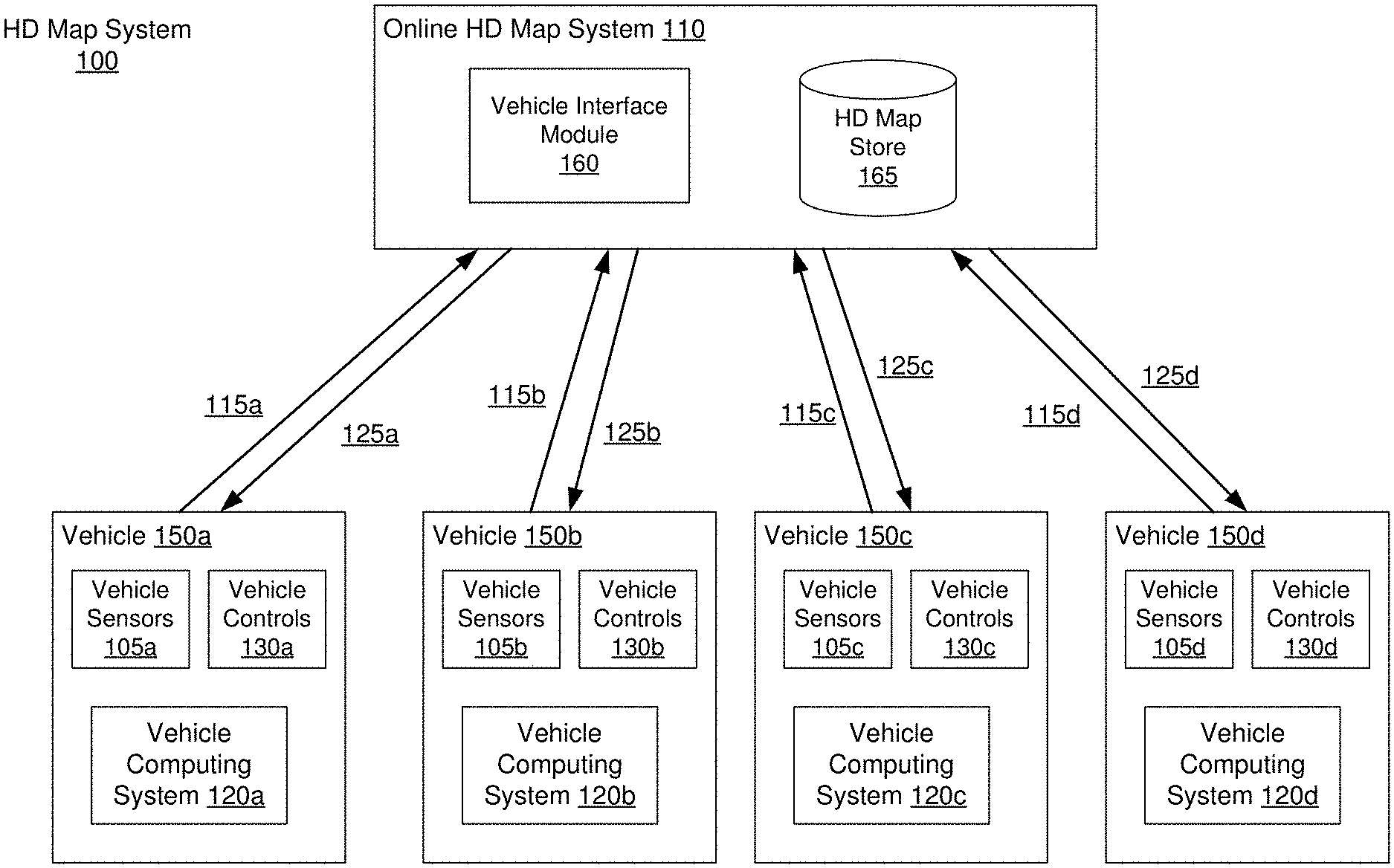
Das US-Patent US10897575B2 mit dem Titel "Lidar to Camera Calibration for Generating High Definition Maps" (Lidar-Kamera-Kalibrierung zur Erstellung von hochauflösenden Karten), das Deepmap zugewiesen wurde, beschreibt die Erstellung von hochauflösenden Karten durch die Kombination von Daten, die von verschiedenen Sensoren erfasst wurden, um die Qualität der erstellten Karten und die Effizienz der Erstellung von Karten durch ein nichttransitorisches, computerlesbares Speichermedium zu verbessern, auf dem Anweisungen gespeichert sind, indem eine Kalibrierung der Sensoren eines Fahrzeugs durchgeführt wird. Das System verwendet ein Muster (z. B. ein Schachbrettmuster) in der Ansicht und in der Nähe des Fahrzeugs, um eine ungefähre Lidar-zu-Kamera-Transformation zu bestimmen, und dann in einem Abstand vom Fahrzeug, um eine genaue Lidar-zu-Kamera-Transformation zu bestimmen.
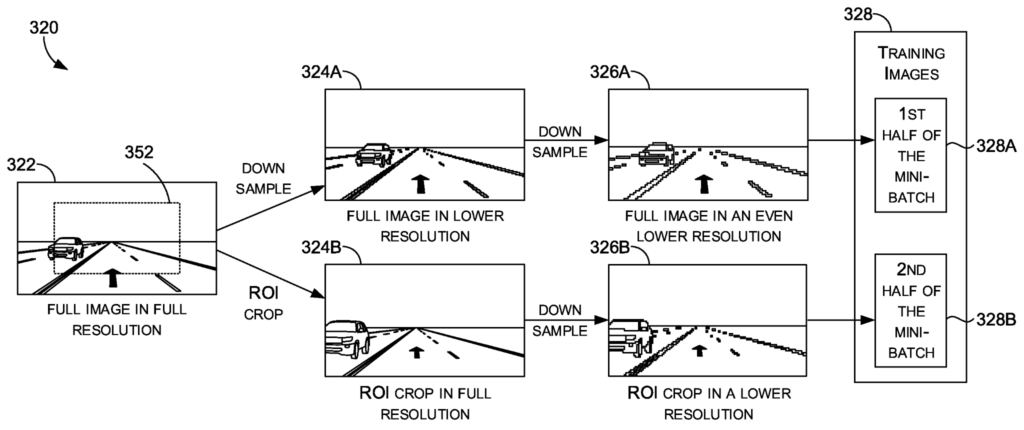
Das US-Patent US10997433B2 mit dem Titel "Real-Time Detection of Lanes and Boundaries by Autonomous Vehicles" (Echtzeit-Erkennung von Fahrspuren und Grenzen durch autonome Fahrzeuge), das NVIDIA zugewiesen wurde, beschreibt die Erkennung von Fahrspuren und Straßengrenzen in Echtzeit mithilfe von Deep Neural Networks (DNN). Das DNN ist so konzipiert, dass es Fahrspur- und Begrenzungsmarkierungen ableitet und eine oder mehrere Segmentierungsmasken (z. B. binär und/oder mehrklassig) erzeugt, die erkennen können, wo in den Darstellungen (z. B. Bild(ern)) der Sensordaten potenzielle Fahrspuren und Straßenbegrenzungen zu finden sind.
Pony AI entwickelt kommerzielle Robotaxis
Das Robotertaxi-Startup Pony.ai plant die Markteinführung seiner autonomen Fahrzeuge bis 2022. Derzeit befinden sich die Fahrzeuge in der Testphase auf den Straßen von Kalifornien. Pony.ai ist auch eine Partnerschaft mit der E-Commerce-Plattform Yamibuy eingegangen, um Kunden in Irvine einen autonomen Lieferservice für die letzte Meile anzubieten. Pony.ai hat bereits eine Reihe von Partnern und mehr als 1 Milliarde Dollar an Finanzmitteln, darunter 400 Millionen Dollar von Toyota, gesammelt. Lesen Sie hier mehr.
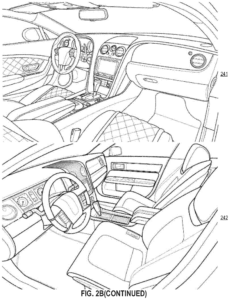
Die US-Patentanmeldung US20210123751A1 mit dem Titel "User Preview of the Interior", die Pony AI zugewiesen wurde, beschreibt autonome Fahrzeuge (AVs), die Ridesharing- und Taxidienste anbieten. Das Robotaxi verfügt über eine oder mehrere Fahreigenschaften wie die Reisegeschwindigkeit des Fahrzeugs, eine Beschleunigungsrate des Fahrzeugs und einen Fahrstil oder eine Fahrweise des Fahrzeugs. Ein Nutzer oder Kunde wird mit einem Robotaxi zusammengebracht, basierend auf den Präferenzen des Nutzers bezüglich des Innenraums des Robotaxis und des Fahrstils. Das Fahrzeug verfügt über unzählige Sensoren (z. B. LiDARs, Radare, Kameras usw.), um Objekte in der Umgebung zu erkennen und zu identifizieren, sowie über eine Vielzahl von Aktuatoren, wie z. B. elektromechanische Geräte oder Systeme, um die Gasannahme, die Bremswirkung und die Lenkung usw. des Fahrzeugs zu steuern. Noch interessanter ist, dass das Fahrzeug Straßenschilder (z. B. Geschwindigkeitsbegrenzung, Schulzone, Baustelle usw.) und Verkehrsampeln (z. B. rotes Licht, gelbes Licht, grünes Licht, blinkendes rotes Licht usw.) erkennen, interpretieren und analysieren und die Fahrzeuggeschwindigkeit auf der Grundlage der auf den Straßen angebrachten Geschwindigkeitsbegrenzungsschilder anpassen kann.
Tesla setzt beim autonomen Fahren auf optische Kamera und Netzwerkcomputer
Tesla hat seinen neuen Supercomputer vorgestellt, der es dem Autohersteller ermöglicht, Radar- und Lidarsensoren in selbstfahrenden Autos zugunsten von hochwertigen optischen Kameras zu ersetzen. Das Unternehmen plant, einen Computer dazu zu bringen, auf eine neue Umgebung in einer Weise zu reagieren, wie ein Mensch einen immensen Datensatz erfassen kann. Der enorm leistungsstarke Supercomputer wird zum Trainieren der auf neuronalen Netzen basierenden autonomen Fahrtechnologie des Unternehmens eingesetzt. Daher die Entwicklung dieser Vorläufer von Dojo. Lesen Sie hier mehr .
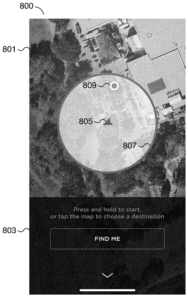
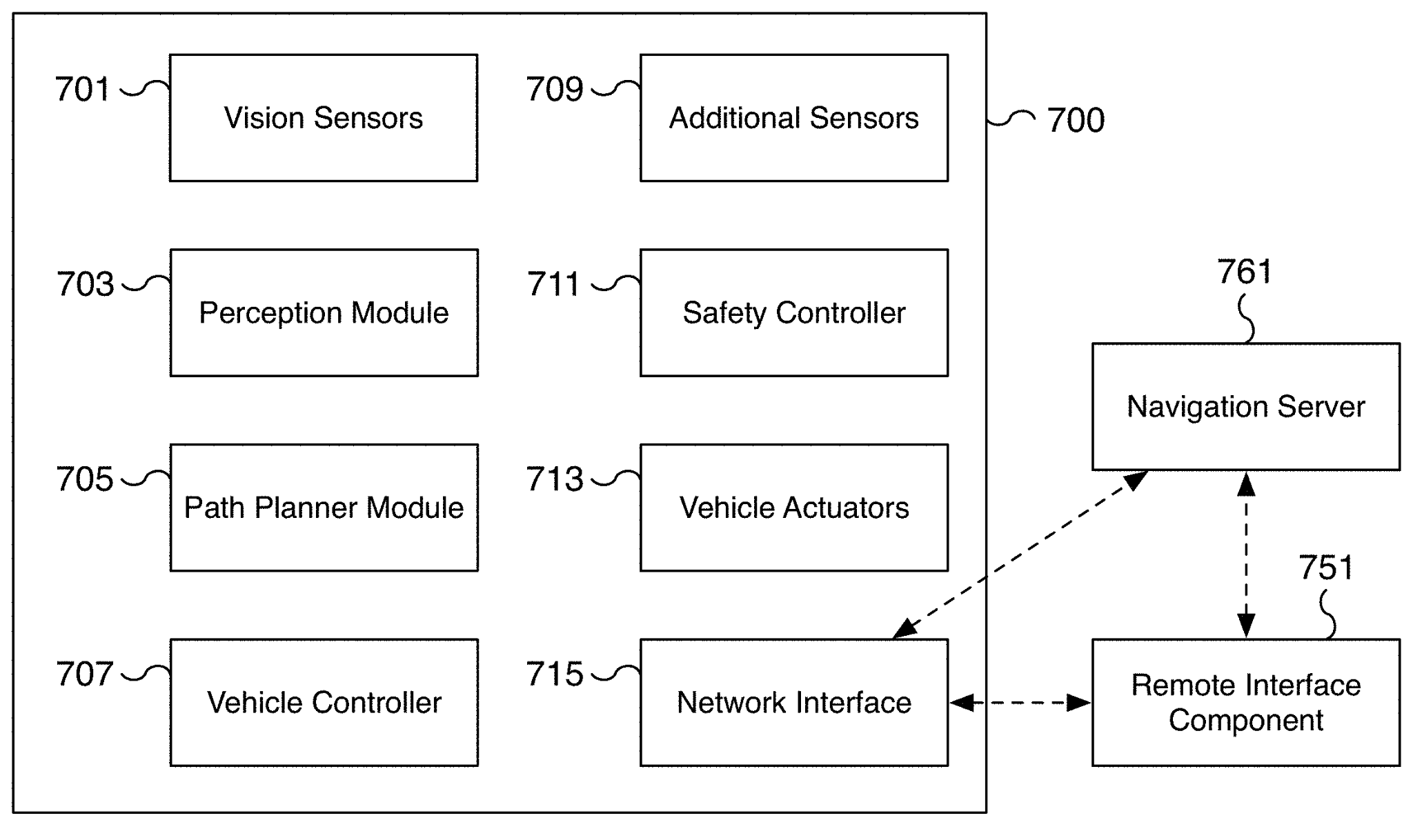
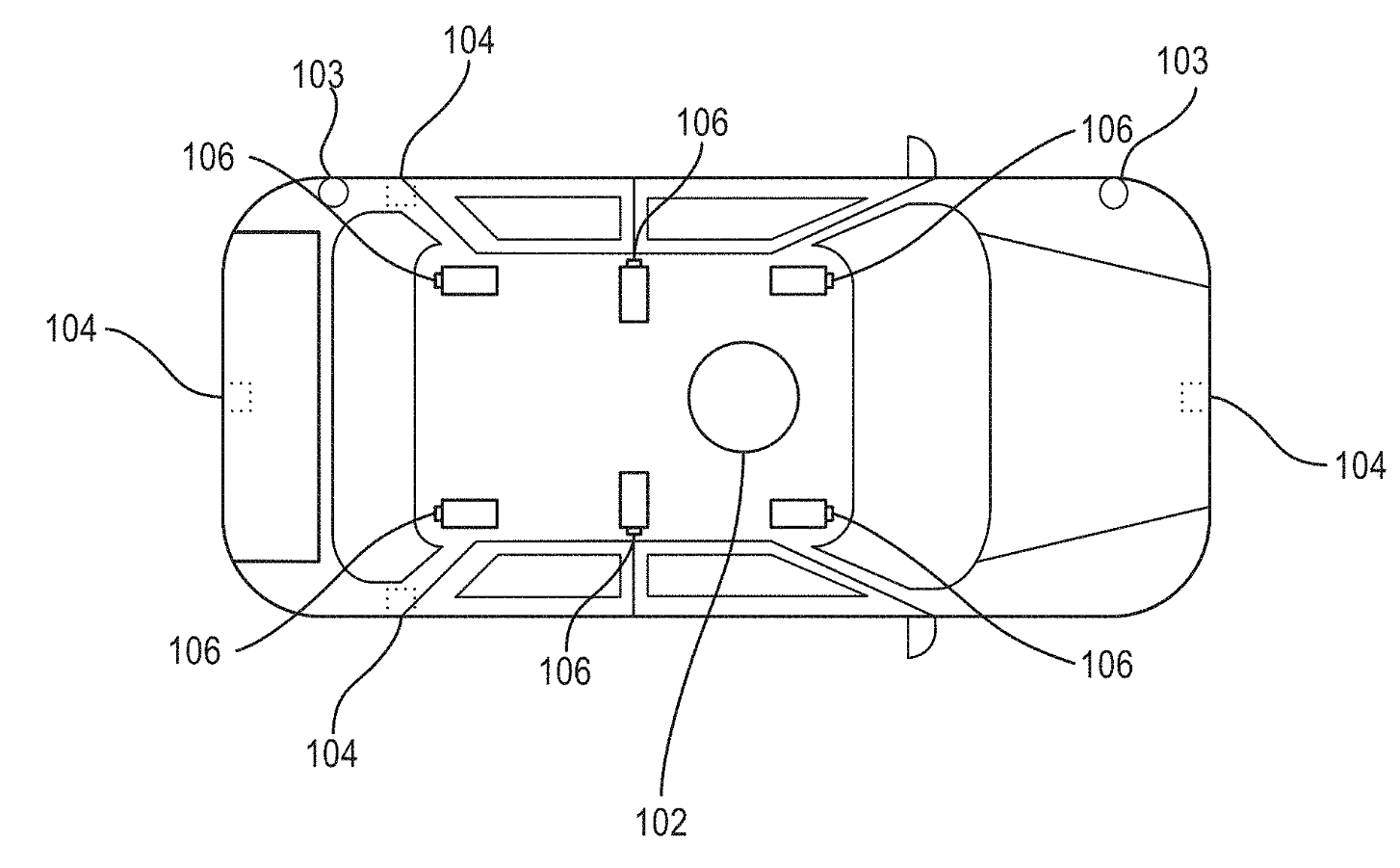
Die US-Patentanmeldung US20200257317A1 mit dem Titel "Autonomous and User-Controlled Vehicle Summon to a Target" (Autonome und benutzergesteuerte Fahrzeugbeschwörung zu einem Ziel), die Tesla zugewiesen wurde, beschreibt eine Technik für ein autonomes Fahrzeug, das zu dem von einem Benutzer angegebenen Zielort navigiert. Zu diesem Zweck nutzt das Fahrzeug Sensordaten, wie z. B. Sichtdaten, die von hinter der Windschutzscheibe montierten Kameras, nach vorn und/oder zur Seite gerichteten Kameras in den Säulen, nach hinten gerichteten Kameras usw. erfasst werden, um eine Darstellung der Umgebung des Fahrzeugs zu erstellen. Bei der Identifizierung eines geografischen Ortes, der mit einem Ziel verbunden ist, das von einem vom Fahrzeug entfernten Benutzer spezifiziert wurde, wird ein maschinelles Lernmodell verwendet, um unter Verwendung von Sensordaten von einem oder mehreren Sensoren des Fahrzeugs eine Darstellung von mindestens einem Teil der Umgebung des Fahrzeugs zu erzeugen. Mindestens ein Befehl wird bereitgestellt, um das Fahrzeug automatisch zu navigieren, basierend auf dem ermittelten Pfad und den aktualisierten Sensordaten von mindestens einem Teil des einen oder der mehreren Sensoren des Fahrzeugs.
Klicken Sie hier, um mehr über unsere Suchdienste zu erfahren.